Networked data-driven self-calibration routines
In ULISSES we are developing networked data-driven calibration algorithms for autonomous CO2 sensor calibration. In a network each sensor has an own belief on the measurement. Sensors that have been recently calibrated using a reference might have a better calibrated sensor model than other sensors that have not been calibrated for long time and their model has become outdated. The idea of networked calibration approaches is to fuse the beliefs of individual sensors and use this fused belief to update the own sensor model.
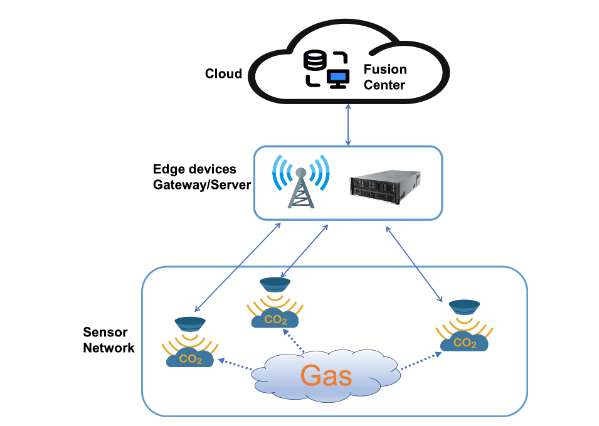
Figure 1: Networked data-driven calibration enabled by Internet-of-Things
In this project we have developed two approaches. In the first approach we fuse beliefs of sensors that meet once and therefore had no chance to establish a joint statistic. Accordingly, the belief fusion strategy is based on the Dempster-Shafer theory. A direct application of this approach would be very sensitive to outliers so that we extended the approach to weight sensor beliefs so that outliers are automatically suppressed.
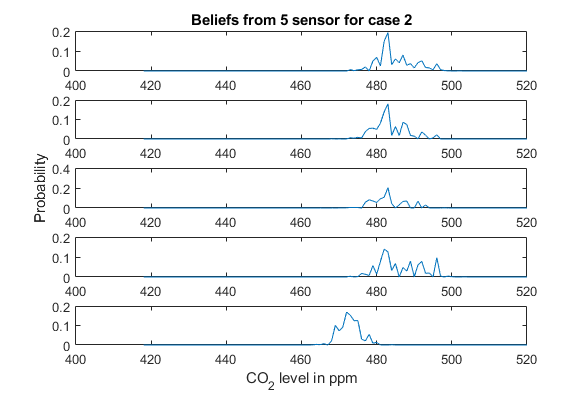
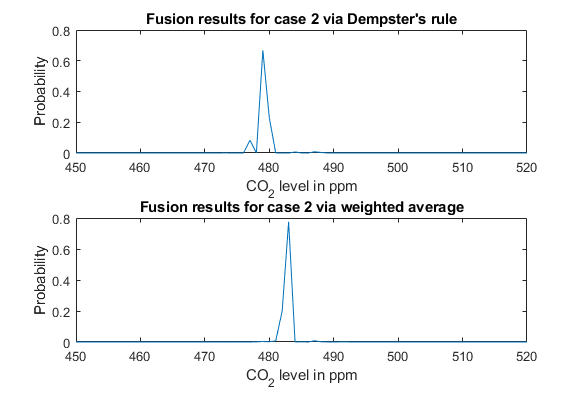
Figure 2: Fusion of five sensor beliefs using Demptster-Shafer approach with and without weighting. Sensor five is an outlier which strongly affects the fused belief without weighting.
In case of distributed sensors that repeatedly meet, sensors can establish a joint statistic. This allows the use of reinforcement learning techniques to assess the quality of the individual sensor models and identify which sensor model should be trusted most and therefore serve as a reference for the others. To manage the computational complexity we developed deep reinforcement learning algorithms that aims to minimize the uncertainty given the past data and predicted future. The numerical experiments show that good long-term stability can be achieved.
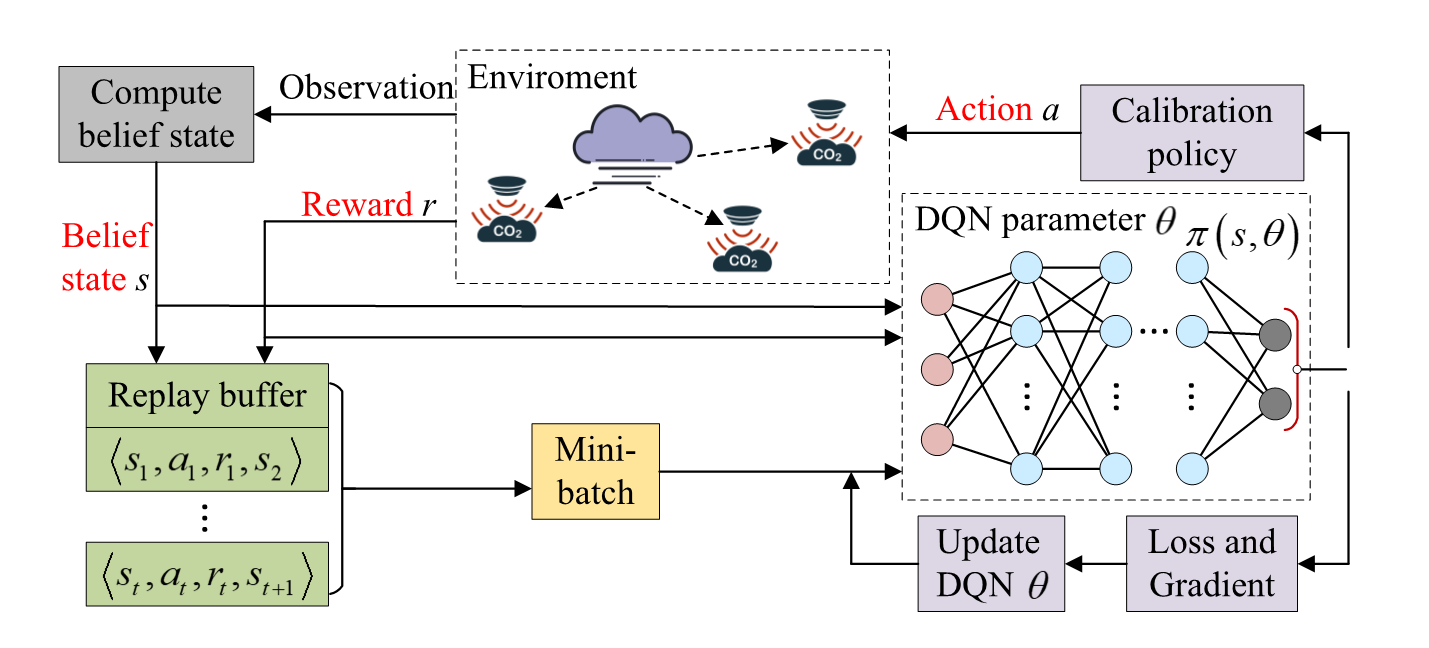
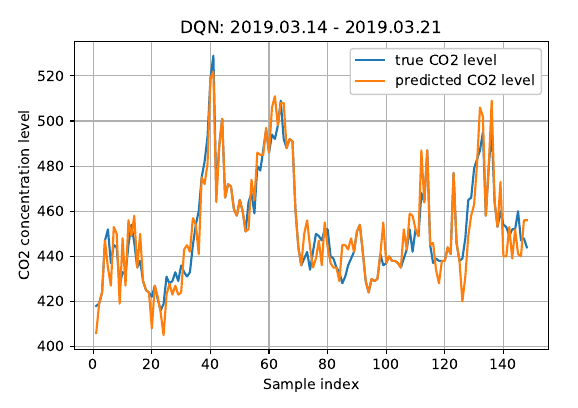
Figure 3: Left plot shows the schematic of the deep reinforcement learning approach. The right plot shows the sensor performance six months after training fusing regularly the sensor beliefs of five sensors.

Yang You, lead author of the paper and ULISSES researcher with KTH
Full reference:
- Y. You, K. You, H. Chen, and T. J. Oechtering, “On Data-Driven Self-Calibration for IoT-Based Gas Concentration Monitoring Systems”, IEEE Internet of Things journal, Vol. 9, p. 13848-13861, 2022..
- DOI: 10.1109/JIOT.2022.3144934
 This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 825272 (ULISSES).
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 825272 (ULISSES).